

代码拉取完成,页面将自动刷新
同步操作将从 CVTeam_CN/RoboCar 强制同步,此操作会覆盖自 Fork 仓库以来所做的任何修改,且无法恢复!!!
确定后同步将在后台操作,完成时将刷新页面,请耐心等待。
a=>operation: 传感器测得数据
b=>operation: 将数据传输给stm32
c=>operation: STM32进行数据解析
d=>operation: STM32通过串口、SPI等方式将处理结果输出
a->b->c->d->e
###1. main函数
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "usmart.h"
#include "usart3.h"
#include "gps.h"
u8 USART1_TX_BUF[USART3_MAX_RECV_LEN];
nmea_msg gpsx;
__align(4) u8 dtbuf[50];
const u8*fixmode_tbl[4]={"Fail","Fail"," 2D "," 3D "};
void Gps_Msg_Show(void) //将解析好的数据发送给串口1
{
float tp;
tp=gpsx.longitude;
sprintf((char *)dtbuf,"Longitude:%.5f %1c ",tp/=100000,gpsx.ewhemi);
printf("\r\n%s\r\n",dtbuf);
tp=gpsx.latitude;
sprintf((char *)dtbuf,"Latitude:%.5f %1c ",tp/=100000,gpsx.nshemi);
printf("%s\r\n",dtbuf);
tp=gpsx.altitude;
sprintf((char *)dtbuf,"Altitude:%.1fm ",tp/=10);
printf("%s\r\n",dtbuf);
tp=gpsx.speed;
sprintf((char *)dtbuf,"Speed:%.3fkm/h ",tp/=1000);
printf("%s\r\n",dtbuf);
sprintf((char *)dtbuf,"UTC Date:%04d/%02d/%02d ",gpsx.utc.year,gpsx.utc.month,gpsx.utc.date);
printf("%s\r\n",dtbuf);
sprintf((char *)dtbuf,"UTC Time:%02d:%02d:%02d ",gpsx.utc.hour,gpsx.utc.min,gpsx.utc.sec);
printf("%s\r\n",dtbuf);
}
int main(void)
{
u16 i,rxlen;
u16 lenx;
u8 key=0XFF;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init(168);
uart_init(115200);
usart3_init(384200);
usmart_dev.init(168);
if(SkyTra_Cfg_Rate(5)!=0)
{
do //得到串口3的数据
{
usart3_init(9600);
SkyTra_Cfg_Prt(3);
usart3_init(38400);
key=SkyTra_Cfg_Tp(100000);
}while(SkyTra_Cfg_Rate(5)!=0&&key!=0);
delay_ms(500);
}
while(1) //将得到的数据通过协议进行分析
{
delay_ms(1);
if(USART3_RX_STA&0X8000)
{
rxlen=USART3_RX_STA&0X7FFF;
for(i=0;i<rxlen;i++)USART1_TX_BUF[i]=USART3_RX_BUF[i];
USART3_RX_STA=0;
USART1_TX_BUF[i]=0;
GPS_Analysis(&gpsx,(u8*)USART1_TX_BUF);
Gps_Msg_Show();
}
lenx++;
}
}
###NMEA-0183协议 NMEA 0183 是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备制定的标准格式。目前业已成了 GPS/北斗导航设备统一的 RTCM(Radio Technical Commission for Maritime services)标准协议。 NMEA-0183 协议采用 ASCII 码来传递 GPS 定位信息,我们称之为帧。 帧格式形如:$aaccc,ddd,ddd,…,ddd*hh(CR)(LF)
“$”:帧命令起始位
aaccc:地址域,前两位为识别符(aa),后三位为语句名(ccc)
ddd…ddd:数据
“*”:校验和前缀(也可以作为语句数据结束的标志)
hh:校验和(check sum),$与*之间所有字符 ASCII 码的校验和(各字节做异或运算,得到校验和后,再转换 16 进制格式的 ASCII 字符)
(CR)(LF):帧结束,回车和换行符 NMEA-0183 常用命令如表 2.2.1.1 所示: |序号 |命令 |说明 |最大帧长| | :----: | :----: | :----: | :----: | |1 |$GNGGA |GPS/北斗定位信息 |72| |2 |$GNGSA |当前卫星信息 |65| |3 |$GPGSV |可见 GPS 卫星信息 |210| |4 |$BDGSV |可见北斗卫星信息 |210| |5 |$GNRMC |推荐定位信息 |70| |6 |$GNVTG |地面速度信息 |34| |7 |$GNGLL |大地坐标信息 |--| |8 |$GNZDA |当前时间(UTC1)信息|--| ####注 1: 即协调世界时,相当于本初子午线(0 度经线)上的时间,北京时间比 UTC 早 8 个小时。 ####接下来我们分别介绍这些命令。
$GNGGA(GPS 定位信息,Global Positioning System Fix Data)
$GNGGA 语句的基本格式如下(其中 M 指单位 M,hh 指校验和,CR 和 LF 代表回车换行,下同):
$GNGGA,(1),(2),(3),(4),(5),(6),(7),(8),(9),M,(10),M,(11),(12)hh(CR)(LF)
(1)UTC 时间,格式为 hhmmss.ss;
(2)纬度,格式为 ddmm.mmmmm(度分格式);
(3)纬度半球,N 或 S(北纬或南纬);
(4)经度,格式为 dddmm.mmmmm(度分格式);
(5)经度半球,E 或 W(东经或西经);
(6)GPS 状态,0=未定位,1=非差分定位,2=差分定位;
(7)正在使用的用于定位的卫星数量(0012)
(8)HDOP 水平精确度因子(0.599.9)
(9)海拔高度(-9999.9 到 9999.9 米)
(10)大地水准面高度(-9999.9 到 9999.9 米)
(11)差分时间(从最近一次接收到差分信号开始的秒数,非差分定位,此项为空) (12) 差分参考基站标号(0000 到 1023,首位 0 也将传送,非差分定位,此项为空) 举例如下:
$GNGGA,095528.000,2318.1133,N,11319.7210,E,1,06,3.7,55.1,M,-5.4,M,,000069
$GNGSA(当前卫星信息) $GNGSA 语句的基本格式如下: $GNGSA,(1),(2),(3),(3),(3),(3),(3),(3),(3),(3),(3),(3),(3),(3),(4),(5),(6)hh(CR)(LF) (1)模式,M = 手动,A = 自动。 (2)定位类型,1=未定位,2=2D 定位,3=3D 定位。 (3)正在用于定位的卫星号(01~32) (4)PDOP 综合位置精度因子(0.5-99.9) (5)HDOP 水平精度因子 1(0.5-99.9) (6)VDOP 垂直精度因子(0.5-99.9)举例如下: $GNGSA,A,3,14,22,24,12,,,,,,,,,4.2,3.7,2.12D $GNGSA,A,3,209,214,,,,,,,,,,,4.2,3.7,2.1*21 注 1: 精度因子值越小,则准确度越高。
$GPGSV(可见卫星数,GPS Satellites in View)
$GPGSV 语句的基本格式如下:
$GPGSV, (1),(2),(3),(4),(5),(6),(7),...,(4),(5),(6),(7)hh(CR)(LF)
(1)GSV 语句总数。
(2)本句 GSV 的编号。
(3)可见卫星的总数(0012,前面的 0 也将被传输)。
(4)卫星编号(0132,前面的 0 也将被传输)。
(5)卫星仰角(0090 度,前面的 0 也将被传输)。
(6)卫星方位角(000359 度,前面的 0 也将被传输)
(7) 信噪比(00~99dB,没有跟踪到卫星时为空)。
注:每条 GSV 语句最多包括四颗卫星的信息,其他卫星的信息将在下一条$GPGSV 语句中输出。
举例如下:
$GPGSV,3,1,11,18,73,129,19,10,71,335,40,22,63,323,41,25,49,127,0678 $GPGSV,3,2,11,14,41,325,46,12,36,072,34,31,32,238,22,21,23,194,0876 $GPGSV,3,3,11,24,21,039,40,20,08,139,07,15,08,086,0345
$BDGSV(可见卫星数,GPS Satellites in View)
$BDGSV 语句的基本格式如下:
$BDGSV, (1),(2),(3),(4),(5),(6),(7),...,(4),(5),(6),(7)hh(CR)(LF)
(1)GSV 语句总数。
(2)本句 GSV 的编号。
(3)可见卫星的总数(0012,前面的 0 也将被传输)。
(4)卫星编号(0132,前面的 0 也将被传输)。
(5)卫星仰角(0090 度,前面的 0 也将被传输)。
(6)卫星方位角(000359 度,前面的 0 也将被传输) (7) 信噪比(00~99dB,没有跟踪到卫星时为空)。
注:每条 GSV 语句最多包括四颗卫星的信息,其他卫星的信息将在下一条$BDGSV 语句中输出。 举例如下:
$BDGSV,1,1,02,209,64,354,40,214,05,318,4069
$GNRMC(推荐定位信息,Recommended Minimum Specific GPS/Transit Data)
$GNRMC 语句的基本格式如下:
$GNRMC,(1),(2),(3),(4),(5),(6),(7),(8),(9),(10),(11),(12)hh(CR)(LF)
(1)UTC 时间,hhmmss(时分秒)
(2)定位状态,A=有效定位,V=无效定位
(3)纬度 ddmm.mmmmm(度分)
(4)纬度半球 N(北半球)或 S(南半球)
(5)经度 dddmm.mmmmm(度分)
(6)经度半球 E(东经)或 W(西经)
(7)地面速率(000.0999.9 节)
(8)地面航向(000.0359.9 度,以真北方为参考基准)
(9)UTC 日期,ddmmyy(日月年)
(10)磁偏角(000.0~180.0 度,前导位数不足则补 0)
(11)磁偏角方向,E(东)或 W(西)
(12)模式指示(A=自主定位,D=差分,E=估算,N=数据无效)
举例如下:
$GNRMC,095554.000,A,2318.1327,N,11319.7252,E,000.0,005.7,081215,,,A73
$GNVTG(地面速度信息,Track Made Good and Ground Speed)
$GNVTG 语句的基本格式如下:
$GNVTG,(1),T,(2),M,(3),N,(4),K,(5)hh(CR)(LF)
(1)以真北为参考基准的地面航向(000359 度,前面的 0 也将被传输)
(2)以磁北为参考基准的地面航向(000359 度,前面的 0 也将被传输)
(3)地面速率(000.0999.9 节,前面的 0 也将被传输)
(4)地面速率(0000.01851.8 公里/小时,前面的 0 也将被传输) (5) 模式指示(A=自主定位,D=差分,E=估算,N=数据无效)
举例如下:
$GNVTG,005.7,T,,M,000.0,N,000.0,K,A11
$GNGLL(定位地理信息,Geographic Position)
$GNGLL 语句的基本格式如下:
$GNGLL,(1),(2),(3),(4),(5),(6),(7)hh(CR)(LF)
(1)纬度 ddmm.mmmmm(度分)
(2)纬度半球 N(北半球)或 S(南半球)
(3)经度 dddmm.mmmmm(度分)
(4)经度半球 E(东经)或 W(西经)
(5)UTC 时间:hhmmss(时分秒)
(6)定位状态,A=有效定位,V=无效定位
(7)模式指示(A=自主定位,D=差分,E=估算,N=数据无效)
举例如下:
$GNGLL,2318.1330,N,11319.7250,E,095556.000,A,A4F
$GNZDA(当前时间信息)
$GNZDA 语句的基本格式如下:
$GNZDA,(1),(2),(3),(4), (5), (6)hh(CR)(LF)
(1)UTC 时间:hhmmss(时分秒)
(2)日 (3) 月
(4)年
(5)本地区域小时(NEO-6M 未用到,为 00)
(6)本地区域分钟(NEO-6M 未用到,为 00)
举例如下:
$GNZDA,095555.000,08,12,2015,00,004C
NMEA-0183协议命令帧部分就介绍到这里,接下来我们看看NMEA-0183协议的校验,通过前面的介绍,我们知道每一帧最后都有一个 hh 的校验和,该校验和是通过计算$与之间所有字符 ASCII 码的异或运算得到,将得到的结果以 ASCII 字符表示就是该校验(hh)。
例如语句:$GNZDA,095555.000,08,12,2015,00,004C,校验和(红色部分参与计算)计算方法为:
0X47 xor 0X4E xor 0X5A xor 0X44 xor 0X41 xor 0X2C xor 0X30 xor 0X39 xor 0X35 xor 0X35 xor 0X35 xor 0X35 xor 0X2E xor 0X30 xor 0X30 xor 0X30 xor 0X2C xor 0X30 xor 0X38 xor 0X2C xor 0X31 xor 0X32 xor 0X2C xor 0X32 xor 0X30 xor 0X31 xor 0X35 xor 0X2C xor
0X30 xor 0X30 xor 0X2C xor 0X30 xor 0X30
得到的结果就是 0X4C,用 ASCII 表示就是 4C。
###代码
#include "gps.h"
#include "led.h"
#include "delay.h"
#include "usart3.h"
#include "stdio.h"
#include "stdarg.h"
#include "string.h"
#include "math.h"
const u32 BAUD_id[9]={4800,9600,19200,38400,57600,115200,230400,460800,921600};
u8 NMEA_Comma_Pos(u8 *buf,u8 cx)
{
u8 *p=buf;
while(cx)
{
if(*buf=='*'||*buf<' '||*buf>'z')return 0XFF;
if(*buf==',')cx--;
buf++;
}
return buf-p;
}
u32 NMEA_Pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
int NMEA_Str2num(u8 *buf,u8*dx)
{
u8 *p=buf;
u32 ires=0,fres=0;
u8 ilen=0,flen=0,i;
u8 mask=0;
int res;
while(1)
{
if(*p=='-'){mask|=0X02;p++;}
if(*p==','||(*p=='*'))break;
if(*p=='.'){mask|=0X01;p++;}
else if(*p>'9'||(*p<'0'))
{
ilen=0;
flen=0;
break;
}
if(mask&0X01)flen++;
else ilen++;
p++;
}
if(mask&0X02)buf++;
for(i=0;i<ilen;i++)
{
ires+=NMEA_Pow(10,ilen-1-i)*(buf[i]-'0');
}
if(flen>5)flen=5;
*dx=flen;
for(i=0;i<flen;i++)
{
fres+=NMEA_Pow(10,flen-1-i)*(buf[ilen+1+i]-'0');
}
res=ires*NMEA_Pow(10,flen)+fres;
if(mask&0X02)res=-res;
return res;
}
void NMEA_GPGSV_Analysis(nmea_msg *gpsx,u8 *buf)
{
u8 *p,*p1,dx;
u8 len,i,j,slx=0;
u8 posx;
p=buf;
p1=(u8*)strstr((const char *)p,"$GPGSV");
len=p1[7]-'0';
posx=NMEA_Comma_Pos(p1,3);
if(posx!=0XFF)gpsx->svnum=NMEA_Str2num(p1+posx,&dx);
for(i=0;i<len;i++)
{
p1=(u8*)strstr((const char *)p,"$GPGSV");
for(j=0;j<4;j++)
{
posx=NMEA_Comma_Pos(p1,4+j*4);
if(posx!=0XFF)gpsx->slmsg[slx].num=NMEA_Str2num(p1+posx,&dx);
else break;
posx=NMEA_Comma_Pos(p1,5+j*4);
if(posx!=0XFF)gpsx->slmsg[slx].eledeg=NMEA_Str2num(p1+posx,&dx);
else break;
posx=NMEA_Comma_Pos(p1,6+j*4);
if(posx!=0XFF)gpsx->slmsg[slx].azideg=NMEA_Str2num(p1+posx,&dx);
else break;
posx=NMEA_Comma_Pos(p1,7+j*4);
if(posx!=0XFF)gpsx->slmsg[slx].sn=NMEA_Str2num(p1+posx,&dx);
else break;
slx++;
}
p=p1+1;
}
}
void NMEA_BDGSV_Analysis(nmea_msg *gpsx,u8 *buf)
{
u8 *p,*p1,dx;
u8 len,i,j,slx=0;
u8 posx;
p=buf;
p1=(u8*)strstr((const char *)p,"$BDGSV");
len=p1[7]-'0';
posx=NMEA_Comma_Pos(p1,3);
if(posx!=0XFF)gpsx->beidou_svnum=NMEA_Str2num(p1+posx,&dx);
for(i=0;i<len;i++)
{
p1=(u8*)strstr((const char *)p,"$BDGSV");
for(j=0;j<4;j++)
{
posx=NMEA_Comma_Pos(p1,4+j*4);
if(posx!=0XFF)gpsx->beidou_slmsg[slx].beidou_num=NMEA_Str2num(p1+posx,&dx);
else break;
posx=NMEA_Comma_Pos(p1,5+j*4);
if(posx!=0XFF)gpsx->beidou_slmsg[slx].beidou_eledeg=NMEA_Str2num(p1+posx,&dx);
else break;
posx=NMEA_Comma_Pos(p1,6+j*4);
if(posx!=0XFF)gpsx->beidou_slmsg[slx].beidou_azideg=NMEA_Str2num(p1+posx,&dx);
else break;
posx=NMEA_Comma_Pos(p1,7+j*4);
if(posx!=0XFF)gpsx->beidou_slmsg[slx].beidou_sn=NMEA_Str2num(p1+posx,&dx);
else break;
slx++;
}
p=p1+1;
}
}
void NMEA_GNGGA_Analysis(nmea_msg *gpsx,u8 *buf)
{
u8 *p1,dx;
u8 posx;
p1=(u8*)strstr((const char *)buf,"$GNGGA");
posx=NMEA_Comma_Pos(p1,6);
if(posx!=0XFF)gpsx->gpssta=NMEA_Str2num(p1+posx,&dx);
posx=NMEA_Comma_Pos(p1,7);
if(posx!=0XFF)gpsx->posslnum=NMEA_Str2num(p1+posx,&dx);
posx=NMEA_Comma_Pos(p1,9);
if(posx!=0XFF)gpsx->altitude=NMEA_Str2num(p1+posx,&dx);
}
void NMEA_GNGSA_Analysis(nmea_msg *gpsx,u8 *buf)
{
u8 *p1,dx;
u8 posx;
u8 i;
p1=(u8*)strstr((const char *)buf,"$GNGSA");
posx=NMEA_Comma_Pos(p1,2);
if(posx!=0XFF)gpsx->fixmode=NMEA_Str2num(p1+posx,&dx);
for(i=0;i<12;i++)
{
posx=NMEA_Comma_Pos(p1,3+i);
if(posx!=0XFF)gpsx->possl[i]=NMEA_Str2num(p1+posx,&dx);
else break;
}
posx=NMEA_Comma_Pos(p1,15);
if(posx!=0XFF)gpsx->pdop=NMEA_Str2num(p1+posx,&dx);
posx=NMEA_Comma_Pos(p1,16);
if(posx!=0XFF)gpsx->hdop=NMEA_Str2num(p1+posx,&dx);
posx=NMEA_Comma_Pos(p1,17);
if(posx!=0XFF)gpsx->vdop=NMEA_Str2num(p1+posx,&dx);
}
void NMEA_GNRMC_Analysis(nmea_msg *gpsx,u8 *buf)
{
u8 *p1,dx;
u8 posx;
u32 temp;
float rs;
p1=(u8*)strstr((const char *)buf,"$GNRMC");.
posx=NMEA_Comma_Pos(p1,1);
if(posx!=0XFF)
{
temp=NMEA_Str2num(p1+posx,&dx)/NMEA_Pow(10,dx);
gpsx->utc.hour=temp/10000;
gpsx->utc.min=(temp/100)%100;
gpsx->utc.sec=temp%100;
}
posx=NMEA_Comma_Pos(p1,3);
if(posx!=0XFF)
{
temp=NMEA_Str2num(p1+posx,&dx);
gpsx->latitude=temp/NMEA_Pow(10,dx+2);
rs=temp%NMEA_Pow(10,dx+2);
gpsx->latitude=gpsx->latitude*NMEA_Pow(10,5)+(rs*NMEA_Pow(10,5-dx))/60;
}
posx=NMEA_Comma_Pos(p1,4);
if(posx!=0XFF)gpsx->nshemi=*(p1+posx);
posx=NMEA_Comma_Pos(p1,5);
if(posx!=0XFF)
{
temp=NMEA_Str2num(p1+posx,&dx);
gpsx->longitude=temp/NMEA_Pow(10,dx+2);
rs=temp%NMEA_Pow(10,dx+2);
gpsx->longitude=gpsx->longitude*NMEA_Pow(10,5)+(rs*NMEA_Pow(10,5-dx))/60;
}
posx=NMEA_Comma_Pos(p1,6);
if(posx!=0XFF)gpsx->ewhemi=*(p1+posx);
posx=NMEA_Comma_Pos(p1,9);
if(posx!=0XFF)
{
temp=NMEA_Str2num(p1+posx,&dx);
gpsx->utc.date=temp/10000;
gpsx->utc.month=(temp/100)%100;
gpsx->utc.year=2000+temp%100;
}
}
void NMEA_GNVTG_Analysis(nmea_msg *gpsx,u8 *buf)
{
u8 *p1,dx;
u8 posx;
p1=(u8*)strstr((const char *)buf,"$GNVTG");
posx=NMEA_Comma_Pos(p1,7);
if(posx!=0XFF)
{
gpsx->speed=NMEA_Str2num(p1+posx,&dx);
if(dx<3)gpsx->speed*=NMEA_Pow(10,3-dx);
}
}
void GPS_Analysis(nmea_msg *gpsx,u8 *buf)
{
NMEA_GPGSV_Analysis(gpsx,buf);
NMEA_BDGSV_Analysis(gpsx,buf);
NMEA_GNGGA_Analysis(gpsx,buf);
NMEA_GNGSA_Analysis(gpsx,buf);
NMEA_GNRMC_Analysis(gpsx,buf);
NMEA_GNVTG_Analysis(gpsx,buf);
}
u8 SkyTra_Cfg_Ack_Check(void)
{
u16 len=0,i;
u8 rval=0;
while((USART3_RX_STA&0X8000)==0 && len<100)
{
len++;
delay_ms(5);
}
if(len<100) //³¬Ê±´íÎó.
{
len=USART3_RX_STA&0X7FFF;
for(i=0;i<len;i++)
{
if(USART3_RX_BUF[i]==0X83)break;
else if(USART3_RX_BUF[i]==0X84)
{
rval=3;
break;
}
}
if(i==len)rval=2;
}else rval=1;
USART3_RX_STA=0;
return rval;
}
{
SkyTra_baudrate *cfg_prt=(SkyTra_baudrate *)USART3_TX_BUF;
cfg_prt->sos=0XA1A0;
cfg_prt->PL=0X0400;
cfg_prt->id=0X05;
cfg_prt->com_port=0X00;
cfg_prt->Baud_id=baud_id;
cfg_prt->Attributes=1;
cfg_prt->CS=cfg_prt->id^cfg_prt->com_port^cfg_prt->Baud_id^cfg_prt->Attributes;
cfg_prt->end=0X0A0D;
SkyTra_Send_Date((u8*)cfg_prt,sizeof(SkyTra_baudrate));
delay_ms(200);
usart3_init(BAUD_id[baud_id]);
return SkyTra_Cfg_Ack_Check();
}
u8 SkyTra_Cfg_Tp(u32 width)
{
u32 temp=width;
SkyTra_pps_width *cfg_tp=(SkyTra_pps_width *)USART3_TX_BUF;
temp=(width>>24)|((width>>8)&0X0000FF00)|((width<<8)&0X00FF0000)|((width<<24)&0XFF000000);
cfg_tp->sos=0XA1A0;
cfg_tp->PL=0X0700;
cfg_tp->id=0X65 ;
cfg_tp->Sub_ID=0X01;
cfg_tp->width=temp;
cfg_tp->Attributes=0X01;
cfg_tp->CS=cfg_tp->id^cfg_tp->Sub_ID^(cfg_tp->width>>24)^(cfg_tp->width>>16)&0XFF^(cfg_tp->width>>8)&0XFF^cfg_tp->width&0XFF^cfg_tp->Attributes;
cfg_tp->end=0X0A0D;
SkyTra_Send_Date((u8*)cfg_tp,sizeof(SkyTra_pps_width));
return SkyTra_Cfg_Ack_Check();
}
u8 SkyTra_Cfg_Rate(u8 Frep)
{
SkyTra_PosRate *cfg_rate=(SkyTra_PosRate *)USART3_TX_BUF;
cfg_rate->sos=0XA1A0;
cfg_rate->PL=0X0300;
cfg_rate->id=0X0E;
cfg_rate->rate=Frep;
cfg_rate->Attributes=0X01;
cfg_rate->CS=cfg_rate->id^cfg_rate->rate^cfg_rate->Attributes;
cfg_rate->end=0X0A0D;
SkyTra_Send_Date((u8*)cfg_rate,sizeof(SkyTra_PosRate));
return SkyTra_Cfg_Ack_Check();
}
void SkyTra_Send_Date(u8* dbuf,u16 len)
{
u16 j;
for(j=0;j<len;j++)
{
while((USART3->SR&0X40)==0);
USART3->DR=dbuf[j];
}
}
/**
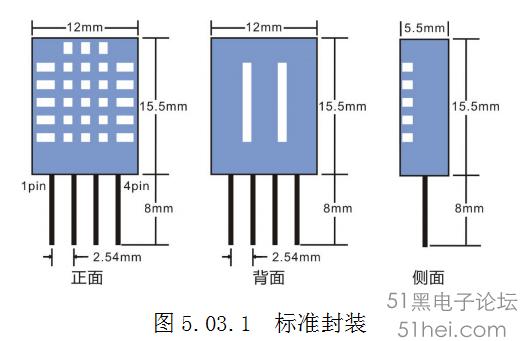
**文件名称:DHT11.c
**文件版本:V1.0
**创建时间:2012/08/06
**创建人员:林木泉
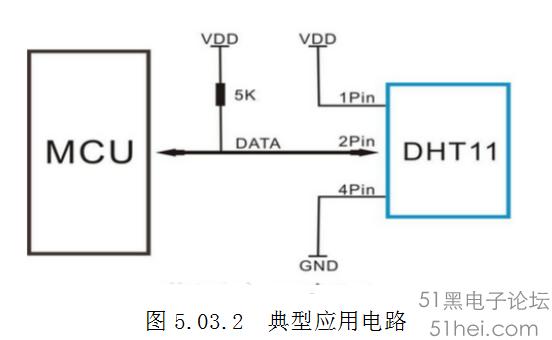
**文件说明:文件为温湿度传感器DHT11的驱动程序
**/
#include "../drive/drive.h"
void GPIO_DHT_Out_Mode(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = DHT11_PORT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //开漏输出
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
void GPIO_DHT_Input_Mode(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = DHT11_PORT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
//----------------------------------------------------------------------------------------------
//--- name : DHT11WriteStart
//--- 功能 : 向DHT11写入一个读取数据的引导码
//----------------------------------------------------------------------------------------------
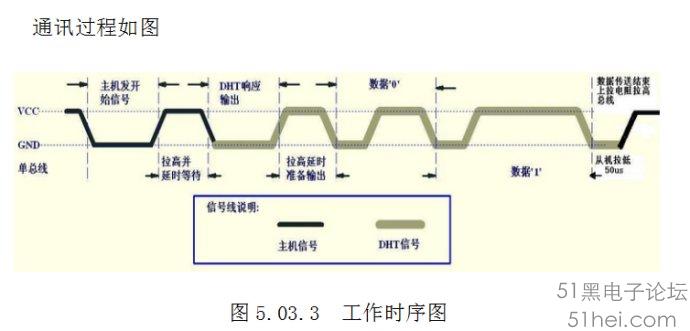
void DHT11WriteStart()
{
GPIO_DHT_Out_Mode();
P10 = 1;
P10 = 0;
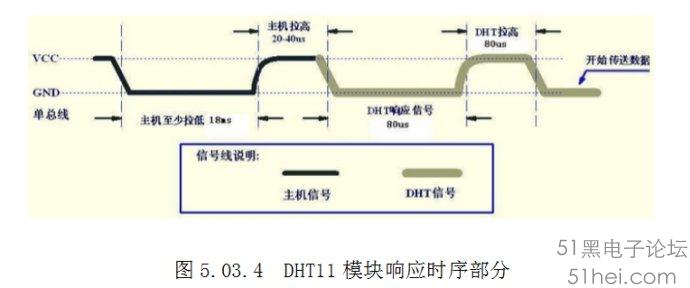
Delay_ms(25);//拉低电平至少18ms
P10 = 1;
Delay_us(30);
}
//----------------------------------------------------------------------------------------------
//--- name : DHT11ReadByte
//--- 功能 : 从DHT11中读取到一个字节
//--- 返回值 : 读取到一个字节的数据
//----------------------------------------------------------------------------------------------
u8 DHT11ReadByte(void)
{
u8 temp=0,i,j=0;
for(i=0;i<8;i++)
{
temp<<=1;
while(0 == DHT11);//等待变高电平
while(1 == DHT11)//计算高电平时长
{
Delay_us(1);
j++;
}
if(j>=30) //超过30us确认为1
{
temp = temp|0x01;
j=0;
}
j=0;
}
return temp;
}
//----------------------------------------------------------------------------------------------
//--- name : DHT11Read(u8 *RH_temp,u8 *RL_temp,u8 *TH_temp,u8 *TL_temp,u8 *CK_temp)
//--- 功能 : 从DHT11中读取数据
//--- 说明 : 测试过程中发现温度数值不变,小数值都是零,此模块未测试成功!
//----------------------------------------------------------------------------------------------
void DHT11Read(u8 *RH_temp,u8 *RL_temp,u8 *TH_temp,u8 *TL_temp,u8 *CK_temp)
{
//uchar TH_temp,TL_temp,RH_temp,RL_temp,CK_temp;
//uchar TL_temp,RL_temp,CK_temp;
//u8 untemp;
while(1)
{
DHT11WriteStart();//给读取前导信号
GPIO_DHT_Input_Mode();//设置端口为输入状态
if(!DHT11)
{
while(0 == DHT11);//低电平的响应信号,80us
while(1 == DHT11);//紧接着是80us的高电平数据准备信号
// *CK_temp = DHT11ReadByte();
// *TL_temp = DHT11ReadByte();
// *TH_temp = DHT11ReadByte();
// *RL_temp = DHT11ReadByte();
// *RH_temp = DHT11ReadByte();
*RH_temp = DHT11ReadByte();//湿度高8位
*RL_temp = DHT11ReadByte();//湿度低8位
*TH_temp = DHT11ReadByte();//温度高8位
*TL_temp = DHT11ReadByte();//温度低8位
*CK_temp = DHT11ReadByte();//校验和
GPIO_DHT_Out_Mode();
P10=1;
//数据校验
//untemp= *RH_temp+RL_temp+*TH_temp+TL_temp;
return;
}
DriveDelay(0x3ff);
}
}
/*********************************************************************************************
*** 代码段 : DHT11__DEBUG
*** 说明 : 该代码段是用于测试温湿度传感器DHT11所用,正常情况下不加入编译。
*** 如果用户要测试该模块,可以将#undef改为#define(在文件头处)
*********************************************************************************************/
#undef DHT11__DEBUG
#define DHT11__DEBUG
#ifdef DHT11__DEBUG
int main(void)
{
u8 TH_temp,TL_temp,RH_temp,RL_temp,CK_temp;
char DisBuf[20];
#ifdef DEBUG
debug();
#endif
SysInit();
// SysTickInit();
InitLcd();
LcdDisText(0x80,"hello world!!!");
while(1)
{
DHT11Read(&RH_temp,&RL_temp,&TH_temp,&TL_temp,&CK_temp);
sprintf(DisBuf,"%d-%d-%d-%d-%d",RH_temp,RL_temp,TH_temp,TL_temp,CK_temp);
// Delay_ms(500);
LcdDisText(0x80+0x40,(u8 *)DisBuf);
LcdDisText(0x80+0x40+15,"h");
}
}
#endif
/**************************************end of DHT11__DEBUG*********************************/
/****************************************end of file ****************************************/
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。







