

代码拉取完成,页面将自动刷新
同步操作将从 LuckyTyrion/ROS 强制同步,此操作会覆盖自 Fork 仓库以来所做的任何修改,且无法恢复!!!
确定后同步将在后台操作,完成时将刷新页面,请耐心等待。
机器人操作系统@双愚
运行环境:Ubuntu18.04 微软云服务器(AzureUser@aitraining)
/home/AzureUser/hcq/ROS
ROS & SLAM个人笔记:https://www.yuque.com/huangzhongqing/ld627o
创建工作空间与功能包详解:https://www.yuque.com/huangzhongqing/ld627o/zr0eix
// 1 设置工作空间
cd catkin_wp/src
catkin_init_workspace
// 编译(需要回到工作空间catkin_wp)
cd ..
catkin_make // 产生build和devel文件夹(类似cmake)
catkin_make install // 就会有install文件夹
//设置环境变量(个人是zsh)
source devel/setup.zsh // 不同shell,不同哦.bash .zsh
通过设置gedit ~/.zshrc,不用每次都source
gedit ~/.zshrc 或者 gedit ~/.bashrc
source ~/.zshrc 或者 source ~/.bashrc
//2 创建功能包(src文件夹下)
//创建包 catkin_create_pkg 包名 依赖1 依赖2
cd src
catkin_create_pkg test_pkg std_msgs roscpp rospy
// 编译功能包(回到目录catkin_ws)
catkin_make
// 设置环境变量(能让系统找到我们的工作空间和功能包) 此命令只在当前终端生效
source devel/setup.bash
通过设置gedit ~/.zshrc,不用每次都source
gedit ~/.zshrc
source ~/.zshrc
// 运行
roscore //启动ROS master
rosrun turtlesim(功能包名) turtlesim_node(节点名) //rosrun启动节点,该节点归属于功能包,这个节点就是小海龟仿真器
rosrun turtlesim turtle_teleop_key
作者:Morgan 其博士生导师:吴恩达!
别人已经造好轮子,集成起来,提高软件复用率。 (有的组织擅长建模,OR导航 OR物理识别,ROS就可以把这些组织都连接起来,帮助他们建立一种相互合作的的高效的方式,在已有成果做更多东西。)
ROS2:一开始只是学术界,后面成为机器人领域的普遍标准,很多设计上的局限性和问题暴露出来,所以需要改良到工业界。
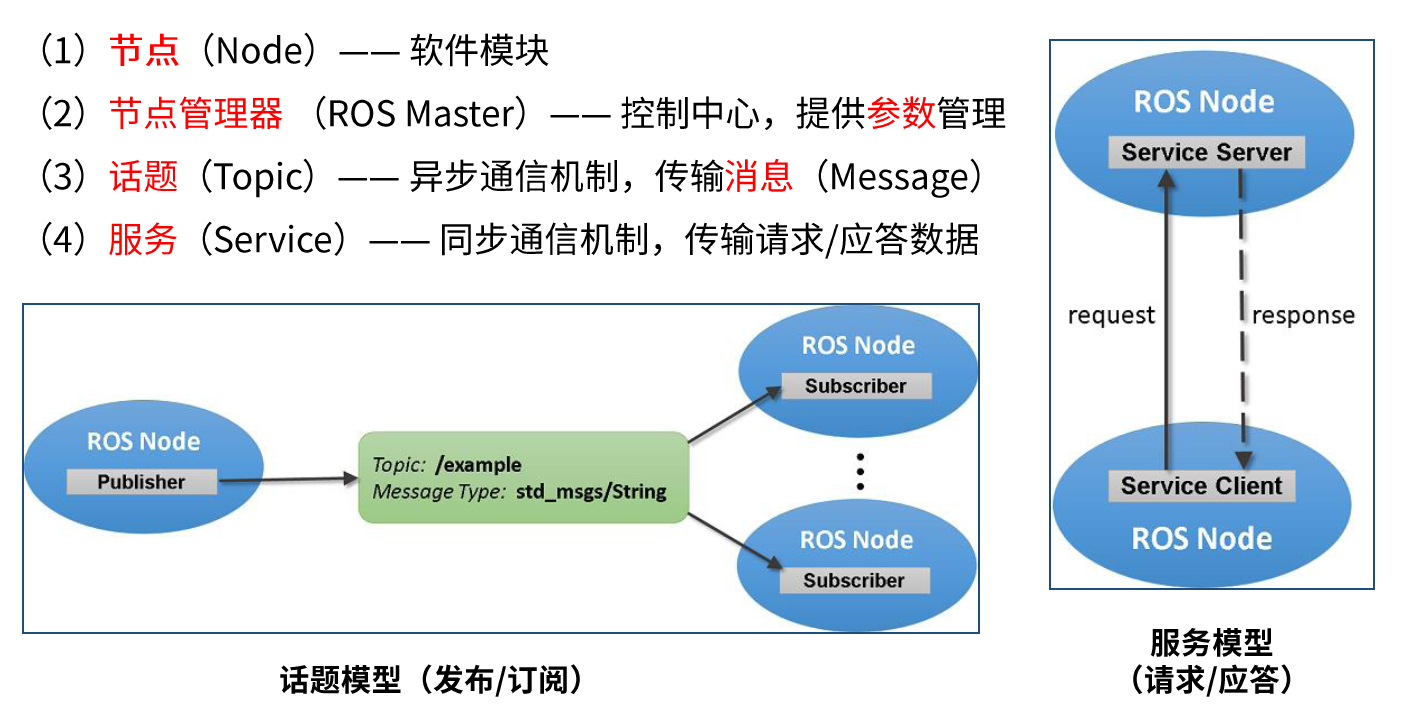
两种通信机制:话题和服务
代码路径: catkin_wp/src PDF路径: slides-ros_21_tutorials 视频:https://www.bilibili.com/video/BV1zt411G7Vn
官方代码: https://github.com/DroidAITech/ROS-Academy-for-Beginners 个人fork代码:https://github.com/HuangCongQing/ROS-Academy-for-Beginners
本地学习 代码路径: catkin_academy/src 视频:https://www.bilibili.com/video/BV1mJ411R7Ni
代码路径: catkin_ROS9/src PDF路径: 机器人操作系统ROS理论与实践
Tips: 注意不同ROS,切换到不同分支
code:
rosrun learning_visualization 1basic_shapes
rosrun learning_visualization 2points_and_lines
rosrun learning_visualization 3path
一个workspace下面可以有多个package,但是workspace有自己组织package的方式。每一个package都是workspace当中的代码包,应该存放在src下面。那么,组织结构如下所示:
---workspace
| |---src
| |---package_1
| |---CMakeLists.txt
| |---src
| |---xxx.cpp
|---package_2
...
|
| |---package_n
视频:https://www.bilibili.com/video/BV1zt411G7Vn
课件:https://github.com/huchunxu/ros_21_tutorials/tree/master/docs/slides
源码:https://github.com/huchunxu/ros_21_tutorials
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。





