

代码拉取完成,页面将自动刷新
自动阈值提取及分割的算法合集:目前已更新的8种算法
fig=imread('cameraman.tif');
figgray=rgb2gray(fig);
MethodName='Cluster_Kittler';
T=Cluster_treshold(reshape(double(figgray),[],1),'Method',MethodName);
MethodName为自动阈值分割方法包括: 'Cluster_Jawahar1','Cluster_Jawahar2','Cluster_Lloyd','Cluster_Ostu', 'Cluster_Kittler','Cluster_EM','Entropy_Kapur','Entropy_Yen'。
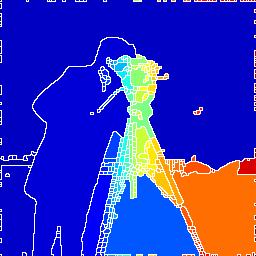
T_K=Cluster_treshold(reshape(double(figgray),[],1),'Method','Cluster_Kittler');
CM=zeros(size(figgray));CM(figgray>T_K)=1;
figure,imshow(CM);title(['Cluster_Kittler分割方法']);
[P_new,label]=Local_Yanowitz(figgray,hsize,MaxInterNum,InterTreshhold,GradTresh);
可调节参数包括:
由于光照的影响,图像的灰度可能是不均匀分布的,此时单一阈值的方法分割效果不好。Yanowitz提出了一种局部阈值分割方法。结合边缘和灰度信息找到阈值表面(treshhold surface)。在阈值表面上的就是目标。
 算法的主要步骤如下:
算法的主要步骤如下:

R(x,y)=P(x,y+1)+P(x,y-1)+P(x-1,y)+P(x+1,y)-4P(x,y)
$$
其中,只有当$\beta=0$时,残差消失(residual vanish)。$1< \beta <2$时收敛更快。$R(x,y)$为拉普拉斯算子,强迫任意点$R(x,y)=0$的几何意义是使得曲线光滑。光滑曲线的梯度是连续变化的,因而其二次导数为0。

[1]S. D. Yanowitz and A. M. Bruckstein, "A new method for image segmentation," Comput. Graph. Image Process. 46, 82–95 ,1989.
分水岭算法对噪声比较敏感,容易出现过分割。常见的处理过分割的方法包括 1). 预处理,图像降噪; 2). 应用标记 (marker)。选择标记需要用户的参与,图像结构的先验知识; 3). 区域融合
本节介绍,基于区域近邻图(Region Adjacency Graph ,RAG)融合的过分割后处理方法。此方法依赖于已分割的区域个数和噪声方差,个数越多效果越差,处理时间越长。最糟的情况是每个像素为1个区域。因而,为了减少分水岭分割的个数,需要对图像先降噪,再分水岭分割,最后区域融合
K个区域的RAG, G=(V,E),其中顶点集$V={1,2...,K}$,对应的边集合$E\subset{V \times V}$。每个顶点节点代表一个区域,边表示和邻近区域相连,边权重代表区域之间的相似度或代价,如图所示:

最相似的邻近区域有最小的代价,代价也就是相似度的计算方式如下:
\delta(R_M^{*i},R_M^{*j})=\frac{||R_M^{*i}||\cdot ||R_M^{*j}||}{||R_M^{*i}||+ ||R_M^{*j}||}[\mu(R_M^{*i})-\mu(R_M^{*j})]^2\mathcal{I(i,j)}
\mathcal{I(i,j)}=
\begin{cases}
1, & if R_M^{*i},R_M^{*j} is adjacent\cr
+\infty, &otherwise.
\end{cases}
$R_M=\{R_M^1,R_M^2,...,R_M^M\}$表示图像Y的M个区域集合。$R_M^k=\{p_{k,1},p_{k,2},...,p_{k,||R_M^k||}\}$是第k个区域$R_M^k$的样本集。$||R||$表示集合的基数,有限集的基数(cardinality )就是传统概念下的“个数”。 $\mu(R_M^k)$是每部分的均值:
\mu(R_M^k)=\frac{1}{||R_M^k||}\sum_{i=1}^{||R_M^k||}Y(p_{k,i})
最后的分割个数n由$\delta(\cdot)$决定,如果$\delta$小于某个阈值则迭代终止。阈值可以根据噪声分布来确定。
输入:K部分的RAG,K-RAG
迭代 util $min(\delta)>= Treshold$
$\delta$最小)输出:(K-n)-RAG
demo_watershed.m 处理步骤:
区域融合后的结果如图所示

[1]. Haris K, Efstratiadis S N, Maglaveras N, et al. Hybrid image segmentation using watersheds and fast region merging.[J]. IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society, 1998, 7(12):1684-1699.
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。







